Движение по кругу: различия между версиями
Перейти к навигации
Перейти к поиску
Arkan100 (обсуждение | вклад) |
Arkan100 (обсуждение | вклад) |
||
| Строка 11: | Строка 11: | ||
<br> | <br> | ||
[[Файл:Движение по кругу-2.jpg|800px|left]]<br> | [[Файл:Движение по кругу-2.jpg|800px|left]]<br> | ||
| + | <br clear="all"/><br><br> | ||
| + | [[Файл:Движение по кругу-3.jpg|700px|left]]<br> | ||
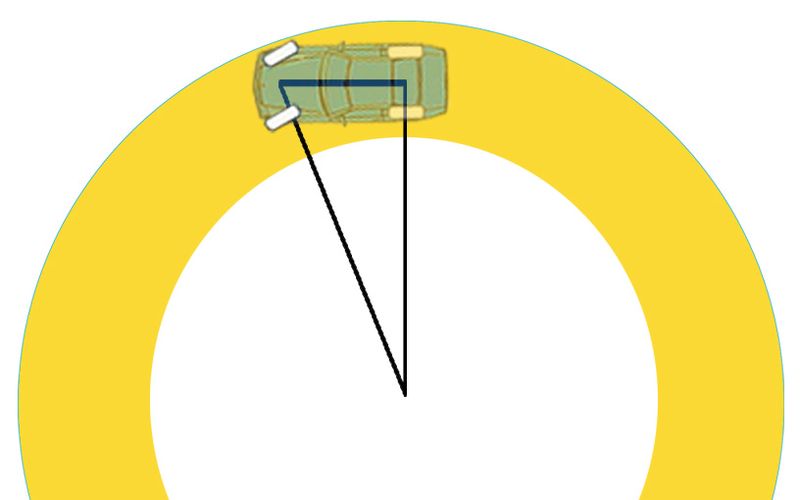
| + | Двигаясь задним ходом в проулок прилегающей территории или между припаркованными автомобилями, не забывайте о том, где находится центр окружности, по которой едет автомобиль. | ||
<br clear="all"/><br><br> | <br clear="all"/><br><br> | ||
[[Файл:Движение по кругу-3.gif|350px|left]]<br> | [[Файл:Движение по кругу-3.gif|350px|left]]<br> | ||
Версия 11:58, 4 февраля 2019

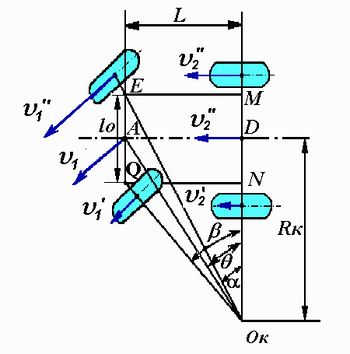
Ок - кинематический центр поворота – это центр поворота автомобиля, движущегося без пробуксовки
Rк - кинематический радиус поворота
V1, V2, V3, V4 - скорости центров колес, передней и задней осей автомобиля.
Все колеса должны перемещаться вокруг одной точки – точки О. Это возможно, если управляемые колеса будут повернуты на углы α и β, а кинематический центр поворота будет находится на продолжении оси задних колес в точке пересечения с прохождением осей передних колес.
ctgα - ctgβ = l0 / L

{kind=link}
Двигаясь задним ходом в проулок прилегающей территории или между припаркованными автомобилями, не забывайте о том, где находится центр окружности, по которой едет автомобиль.
